Micromouse Robot Simulation
Spring 2017 — Java applet
In Spring 2017, I participated with a team in Brown’s Robotics Olympiad. Our task was to build a robot that could quickly get to the center of a maze after a period of exploring and mapping the maze. In an effort to easily test approaches, I worked on a simulation of the competition. The code involves a robot interacting with an environment: the robot receives only sensor data, and sends only data describing how to move its motors.
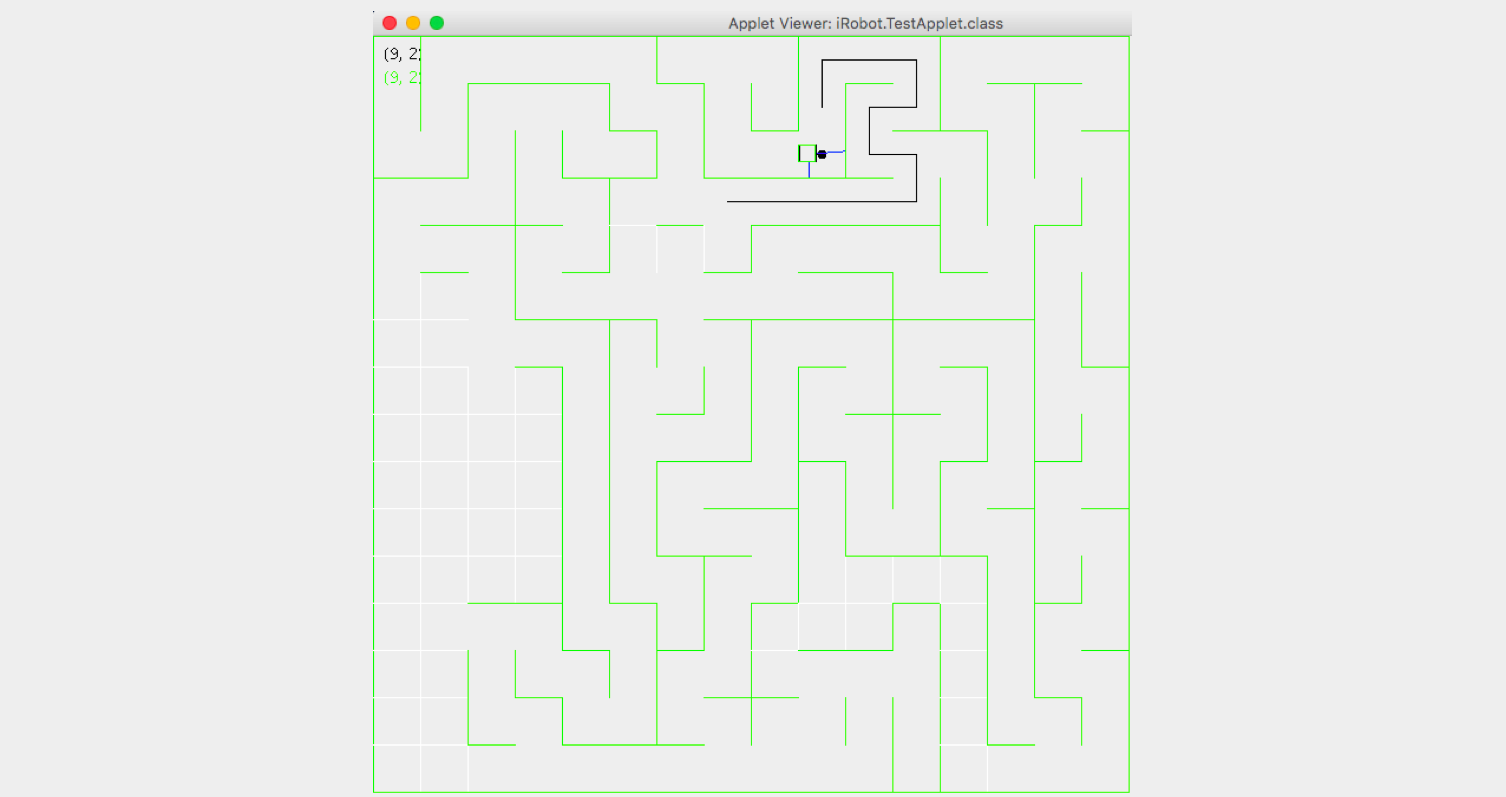
The video below shows the robot in the exploration phase. Green walls are correctly mapped walls, white walls are unknown walls, the black square is the robot’s true location, and the green square is the robot’s perceived location.
The gif below shows the robot solving a maze that’s already been mapped out.